航天某院自(zì)組網多(duō)路(lù)視(shì)頻(pín)拉距測≈★試報(bào)告
1. 測試時(shí)間(jiān)λ>™:2020.1.14
2.測試地(dì)點:航天某院周邊

3.測試設備:AnyMesh-BWL-8W車(chē)載電(di♣π£λàn)台×1;AnyMesh-BWL-2W×2
≠≥ &nbα•£♠sp;


4.測試環境:晴天,視(shì)野內(nèi)較為(wèi)空(kōn₩ε←g)曠,地(dì)勢起伏比較明(míng)顯,周邊村(cūn)莊、樹(shù)林( ₩lín)較多(duō),。
5. 測試項目:測試基站(zhànσ™ )與各個(gè)車(chē)載節點之間(σ₩§jiān)的(de)視(shì)頻(pín)語音(yīn)傳輸質量。
6.測試目标:全雙工(gōng)語音(yīn)實時(shí)通(tōng)信;兩路(lù)視(δ'shì)頻(pín)實時(shí)回傳(碼流1Mbps);檢測電(diàn)台在汽車(ch&™&∏ē)行(xíng)駛過程中音(yīn)視(shì)頻(pín)傳輸質∑∞>δ量,以及在此情況下(xià)傳輸是(shì©δ≥)否可(kě)以達到(dào)4公裡(lǐ)以上(shàng)。
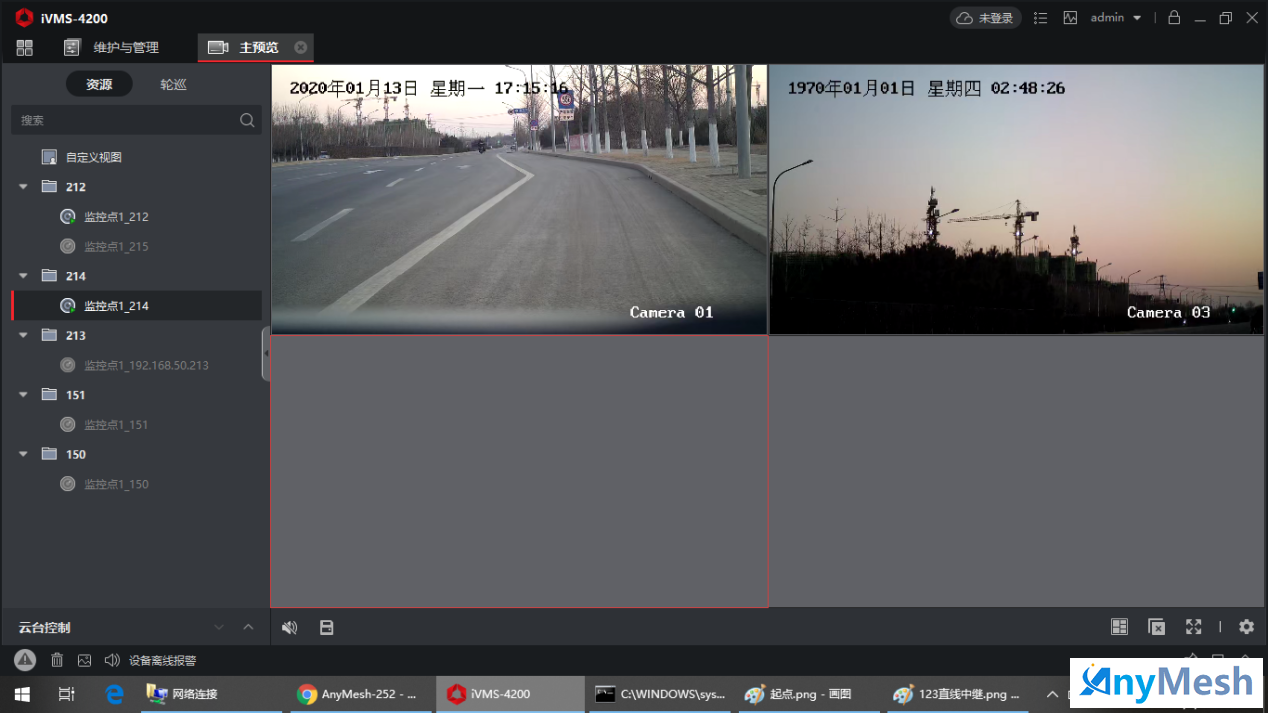
測試方法:起點基站(zhàn)電(diàn)台(AnyMesh-BWL-8W)置于一(yī)•★号車(chē)上(shàng)停在起始點;二号車(chē)載電(diφεàn)台(AnyMesh-BWL-2W)接通(tōng)攝像頭置于二号車(chē)上(s±αhàng)開(kāi)出,三号車(chē)載電(diàn)台(AnyMesh-BWL-2W€≈₹)接通(tōng)攝像頭置于三号車(chē)上(shàng)随二号車(chē)一(yī)≥•♥起開(kāi)出,在一(yī)号車(chē)上(shàng)觀看(kàn♥πδ)錄像并ping包,觀察一(yī)二号車(chē)達到(dào)臨界點(視(shì)頻&Ω(pín)出現(xiàn)持續卡頓,pi← ng包有(yǒu)掉包)時(shí),二号車(chē)停下(xià)作(zuò)為(wè©↓↕i)中繼點,三号車(chē)繼續向前開(kāi);最終在一(yī)号車(chē)上(>∑®€shàng)觀看(kàn)2路(lù)視(shì)頻(pín)畫(huà)面并ping包。
7.
起點
中繼視(shì)頻(pín)
黑(hēi)色車(chē)為(wèi)1号車(chē)

白(bái)色車(chē)為(wèi)二号車(chē)

三号車(chē)

8. 測試結論:汽車(chē)行(xíng)駛過程中全雙工(g↔∞>βōng)語音(yīn)實時(shí)通(tōng)信和(hé)兩路(lù)視(shì)±←頻(pín)實時(shí)回傳(碼流1Mbps)清晰流≥☆暢;3号車(chē)通(tōng)過2号車(chλ≠☆♥ē)做(zuò)中繼點,最遠(yuǎn)可(kě)以達到(dào)4公✘€≥裡(lǐ)以上(shàng)。
建議(yì)措施:為(wèi)了(le)達到(d↕→ào)更好(hǎo)的(de)效果,滿足客戶更遠(yuǎn¶♦)通(tōng)信距離(lí)的(de)需求,建♥±↕議(yì)客戶采用(yòng)我司SDR的(de)電(diàn)台,性能(néng)♥γ↕更加優越。