蕪湖(hú)一(yī)站(zhàn)多(duō)♥♦™☆機(jī)無人(rén)機(jī)集群自(zì)組網鏈路(lù)功能(néng)驗證測試
一(yī)、測試目标
為(wèi)客戶驗收測試。測試完成SDR-A2地(dì)面固定站(zhàn)2α$®£0W與SDR-A2車(chē)載電(diàn)台10W和(hé)SDR-A3機(jī)載φ<電(diàn)台4W設備的(de),快(kuài)÷∑<速同時(shí)組網,功率測試,工(gōng)作(zuò)模式測試,點對(du→'ì)點峰值速率測試,一(yī)站(zhàn)多(d↓↕±uō)機(jī)視(shì)頻(pín)回傳測試,一(yī)站(zhàn)多(duō)機(jī)地€€(dì)面站(zhàn)控制(zhì)飛(fēi)行(xíng)測試,無人(rén)機(jī≠σ> )與地(dì)面站(zhàn)拉距3KM測試等。二,測試數(shù)據
測試快(kuài)速同時(shí)組網,功率,工(gōng)作(zuò)模式,通(tōng)信©≈距離(lí)。如(rú)下(xià)圖所示可(kě)根據電(diàn)台Iα₩&P地(dì)址通(tōng)過Web頁面射頻(pín)參數(shù)±©查看(kàn)以上(shàng)測試信息要(yào)求。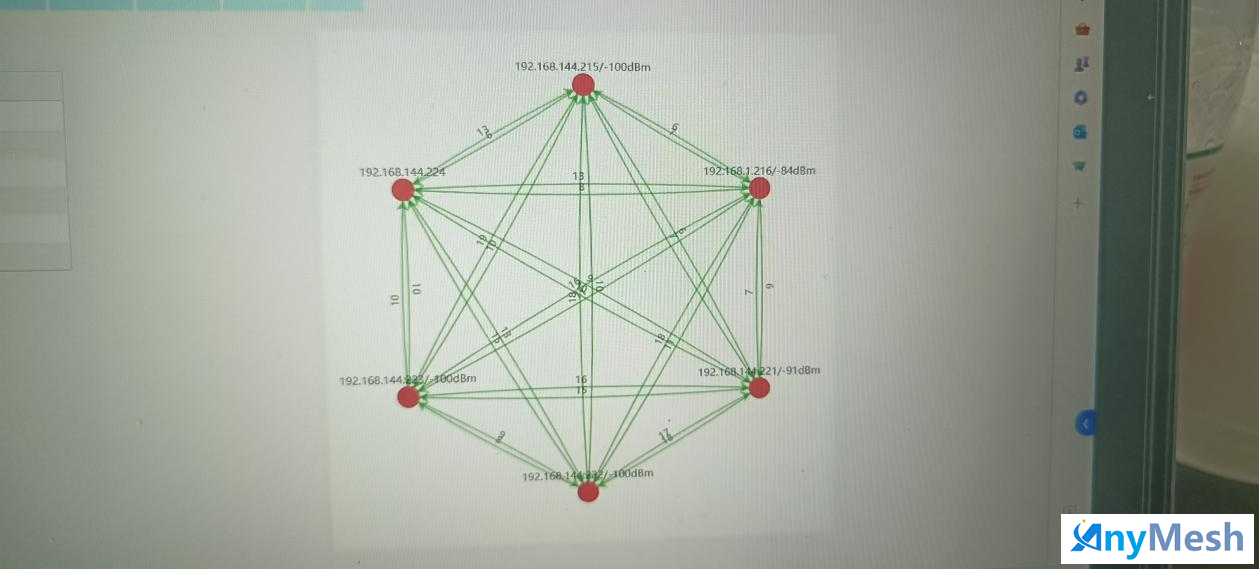
點對(duì)點峰值速率測試,使用(yòng)兩台電(diàn)腦(nǎo)接入≠¥兩台電(diàn)台網口。一(yī)台為(↔₩→wèi)SDR-A2地(dì)面站(zhàn)。一(yī)台為(wèi)♠ λ¥SDR-A3機(jī)載模塊。使用(yòng)iperf3測試©♠工(gōng)具,一(yī)台PC端為(wèi)客戶端,一(yī)台PC為(wèi)≤∏←ε服務端。測試結果如(rú)下(xià)圖
三、測試點位
一(yī)站(zhàn)多(duō)機(jī)地(dì)面站(zhà★ ↑♠n)控制(zhì)飛(fēi)行(xíng),使用(yòng)地(dì)面站(zhàn)∑Ω₽×電(diàn)台SDR-A2地(dì)面站(zhàn≠♠→↔)控制(zhì)SDR-A3機(jī)載電(diàn)台飛(fēi)機↓® (jī)在地(dì)面站(zhàn)發送指令控制(zhì)下≈¶(xià),實現(xiàn)同時(shí)起飛(✔∑®fēi)。規劃航線,降落。


無人(rén)機(jī)與地(dì)面站(zhàn)拉♠↔β$距3KM 将無人(rén)機(jī)原地(→π₽↔dì)起飛(fēi)30米高(gāo)度。車(chē)拉著(zhe)地λ<↓(dì)面站(zhàn)行(xíng)駛到(dào)3.6公裡(lǐ)處滿足驗收要(yào)求距離×α(lí).
